|
Simple Distributed QuickMatch has been implemented (without points being contested). However, there are two problems with the current code. Problem 1: QuickMatch results are incorrectTThe distributed QuickMatch failed to find the matches even between the same images. This screenshot below shows the result of the centralized QuickMatch algorithm run on the same image: 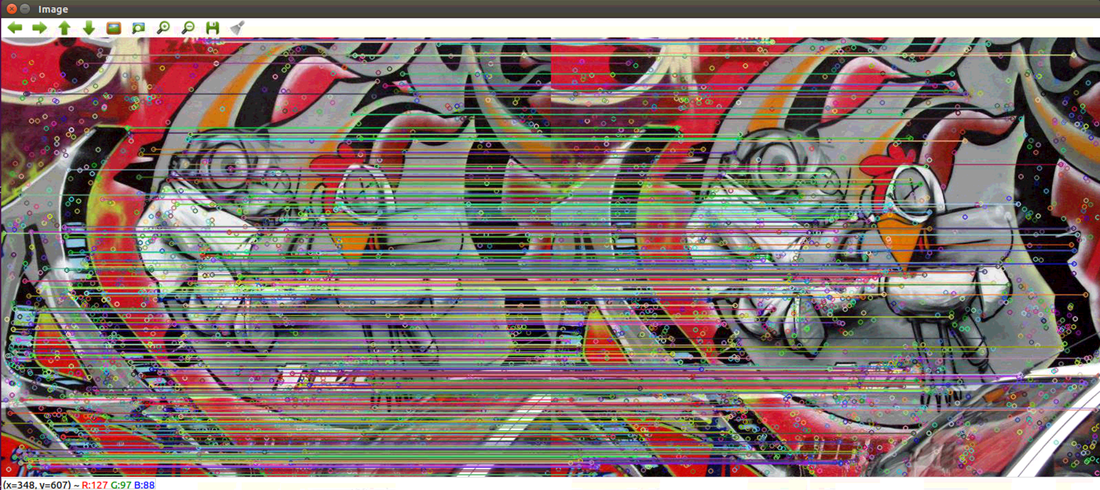 This screenshot below shows the result of the current distributed QuickMatch run on the same image: 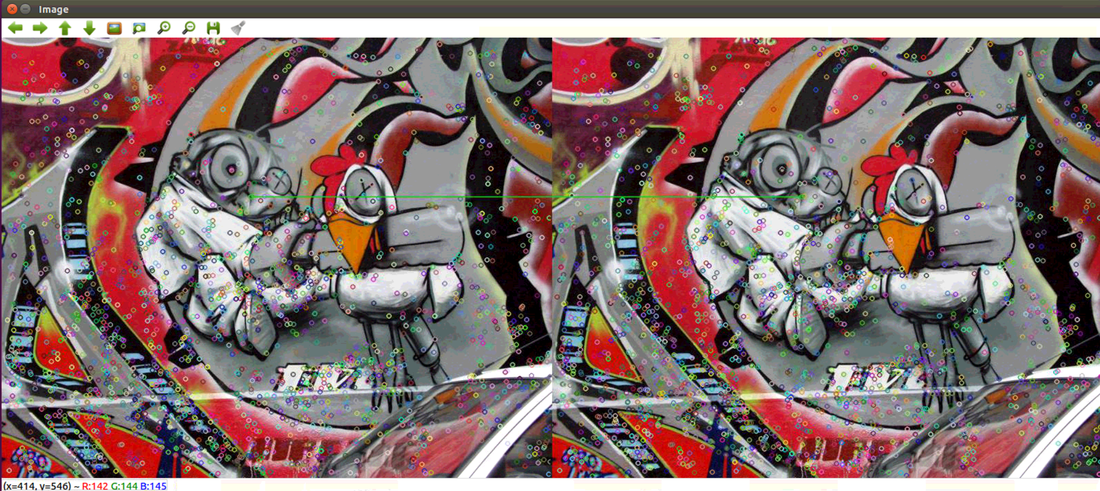 We can see that although the number of features are about the same, the distributed QuickMatch has not enough matches. The goal for next week is to investigate and try to make the result as close to the centralized version ans possible. My assumption is that there is a bug with my code. Part II: ROS constraintsMy distributed QuickMatch code crashes when running on big images. I initially used original images taken with my smart phone of 4032 x 3024 pixels (11MB), and the code would give an error saying insufficient memory. However, after I resized the images to 1/4 of the original size (1008 x 756 pixels), the error went away. I suspect that using multiple nodes in ROS to do image process at the same time has very high memory requirements.
0 Comments
Leave a Reply. |
Archives
May 2020
Categories |
 RSS Feed
RSS Feed
